在微电子封装领域,微卷传质技术已成为大规模显示面 板制造的关键,缺陷修复技术对显示面板的质量控制尤为重 要。 一般来说,这种修复过程需要运动机构以高速和高定位 精度的方式达到和替换缺陷的芯片目标。
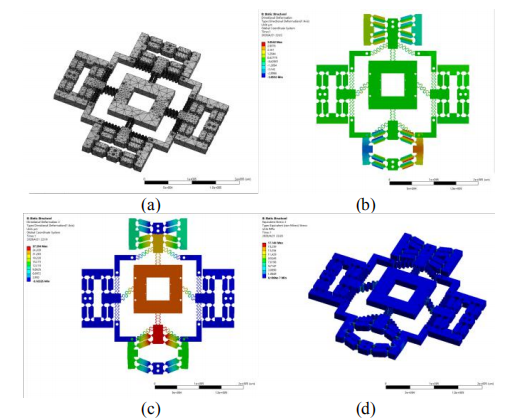
为了满足MicroLED面板修复的要求,本文介绍了一种用于大行程宏微复合阶段的XY 平行解耦柔性微运动平台。 柔性平台由两对柔性双桥放大机 构引导,两对柔性双桥放大机构在移动平台周围对称分布。 通过S型铰链拼接而成的移动对连接到移动平台上,达到解耦 输入输出的性能。 基于微级结构,通过柔性平台的静态和动 态建模,进行柔性和刚度分析。 粒子群算法用于尺寸优化和 机构建模。 通过有限元仿真分析,验证了微动级的性能。 仿 真结果表明,本文提出的XY柔性平台具有良好的并行解耦和放 大比,可用于开发用于缺陷修复的宏观-微观运动阶段 MicroLED面板。 关键词-MicroLED,精密修复,宏微运动平台,纳米定位平 台,柔性铰链
英文版论文,下载链接在文章末尾
本文仅作为学术交流使用,不作为任何商业用途,如有侵权,请联系本站
近年来,新一代显示面板领导者MicroLED已成为微电子封装领域的焦点。 与传统的LCD和OLED显示技术相 比,它不需要依靠背光,使用寿命更长,颜色饱和度更 高,可以实现无缝拼接等优点[1]。 过去,普遍认为微 led最大的瓶颈 是传质技术。 然而,随着质量转移方案的出现[2]如拾 取和位置转移、流体组装、激光转移和滚子转移,瓶颈 的焦点逐渐转移到MicroLED面板修复上。 它需要大约2500万个LED芯片来实现一个55英寸的4K 分辨率显示与MicroLED。 即使转移产率为99.99%,并且 控制每个芯片的精度 在正负0.5 微米内,2500个有缺陷的芯片可能 存在于单个面板中。 因此,大面板的像素缺陷修复技术 对于质量控制尤为重要。 此缺陷的修复过程需要在大面 板区域实现高速,高定位精度,因此需要一个运动范围 大,速度快,精度高的运动平台。 不幸的是,传统的刚 性机构存在摩擦、间隙和装配误差等缺点,难以满足高 精度的性能要求。 然而,与传统的刚性机构相比,柔顺 机构依靠自身的弹性变形来传递运动、力和能量,具有结构简单、无间隙、无摩擦、运动精度高等优点。 因此,柔顺机构已成为精密定位平台中一个很有前途的选 择。目前XY运动平台可分为串联结构和并联结构。 第二 轴运动通过串联结构正交的方式[3]或镶嵌[4]在第一轴 运动阶段。 结构设计相对简单,易于得到正运动学解, 但存在累积误差严重,惯性大,固有频率低等缺点。 相 反,虽然并联结构的设计和优化更加复杂和具有挑战性,但其结构紧凑、刚度高、精度高、承载力好。 因此,平行结构成为微纳米定位平台设计的良好选择。 为了满足微型LED面板修复的要求,提出了一种大行程跨尺度的宏观微复合运动平台结构。 主要介绍了XY并联解耦柔性定位微运动平台。 柔性定位平台采用压电陶瓷驱动,结合V型柔性铰链设计双桥放大机构,实现大行程,高刚性。 整个平台采用镜面对称设计,移动对采用S形铰链拼接连接移动平台,实现输入输出
解耦的工作要求。
 Parallel and Decoupled XY Flexible Positioning Platform for Micro LED Panel Repair.pdf
Parallel and Decoupled XY Flexible Positioning Platform for Micro LED Panel Repair.pdf